Interpolated Position Mode (ip)
The interpolated position mode controls multiple coordinated axles or a single axle with the need for time-interpolation of set set-point data. This modality synchronizes the interpolation points using the SYNC (Synchronization Message) message. Kollmorgendrives only support synchronous linear interpolation, therefore the data structure used for interpolation has only one field and refers to the Interpolation data record (position set-point) (60C1.1H). To ensure proper operations, supply the interpolation data in real time via PDO service.
Internal States and State Transitions
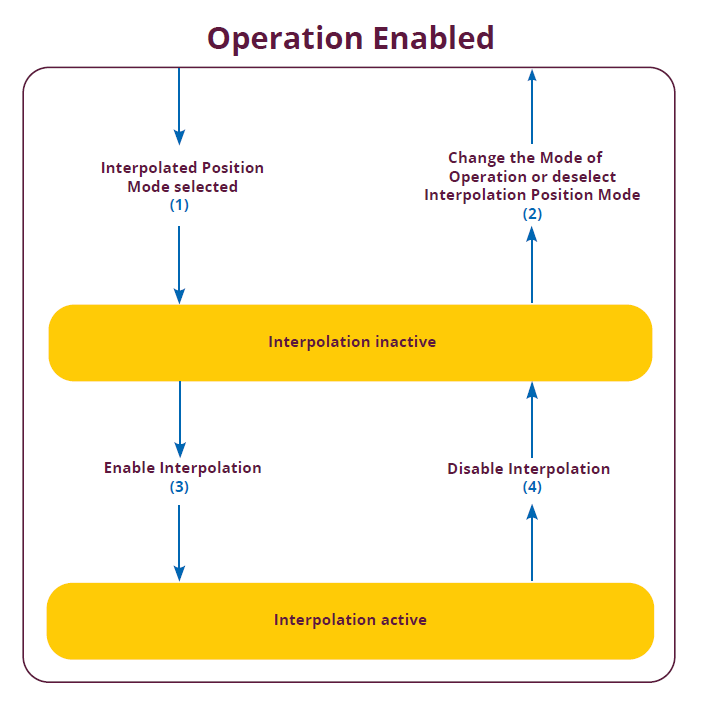
Interpolation inactive
This state is entered when the device is in the OPERATION ENABLED state and the interpolated position mode is selected. The drive will accept input data but it does not move the axles.
Interpolation active
This state is entered when the device is in the OPERATION ENABLED state and the interpolated position mode is selected and enabled. The drive will accept input data and it moves the axles.
State Transition (1)
NO IP-MODE SELECTED => IP-MODE INACTIVE
Event: Enter in the OPERATIONAL ENABLE state with Controlword and select ip mode with modes of operation
State Transition (2)
IP-MODE INACTIVE => NO IP-MODE SELECTED
Event: Leave the OPERATION ENABLE state with Controlword or select any other mode with modes of operation if it is allowed inside the state OPERATION ENABLE
State Transition (3)
IP-MODE INACTIVE => IP-MODE ACTIVE
Event: Set bit enable ip mode (bit4) of the Controlword while in ip mode and OPERATION ENABLED
State Transition (4)
IP-MODE ACTIVE => IP-MODE INACTIVE
Event: Reset bit enable ip mode (bit4) of the Controlword while in ip mode and OPERATION ENABLED
Related objects
|
Index |
Object |
Name |
Type |
Attr. |
M/O |
|---|---|---|---|---|---|
|
6040.0H |
VAR |
UNSIGNED16 |
rw |
M |
|
|
6041.0H |
VAR |
UNSIGNED16 |
ro |
M |
|
|
60C1.0H |
ARRAY |
INTEGER32 |
rw |
O |
|
|
60C2.0H |
RECORD |
Interpolation time period record |
rw |
O |
|
|
60C3.0H |
ARRAY |
UNSIGNED8 |
rw |
O |






